


Section: Software
Software Platforms
Robust robotics manipulation - Object detection and tracking
Participants : Antoine Hoarau [ADT Engineer Since Nov. 2012] , Freek Stulp [Supervisor] , David Filliat [Supervisor] .
Autonomous human-centered robots, for instance robots that assist people with disabilities, must be able to physically manipulate their environment. There is therefore a strong interest within the FLOWERS team to apply the developmental approach to robotics in particular to the acquisition of sophisticated skills for manipulation and perception. ENSTA-ParisTech has recently acquired a Meka (cf. 3 ) humanoid robot dedicated to human-robot interaction, and which is perfectly fitted to this research. The goal of this project is to install state-of-the-art software architecture and libraries for perception and control on the Meka robot, so that this robot can be jointly used by FLOWERS and ENSTA. In particular, we want to provide the robot with an initial set of manipulation skills.
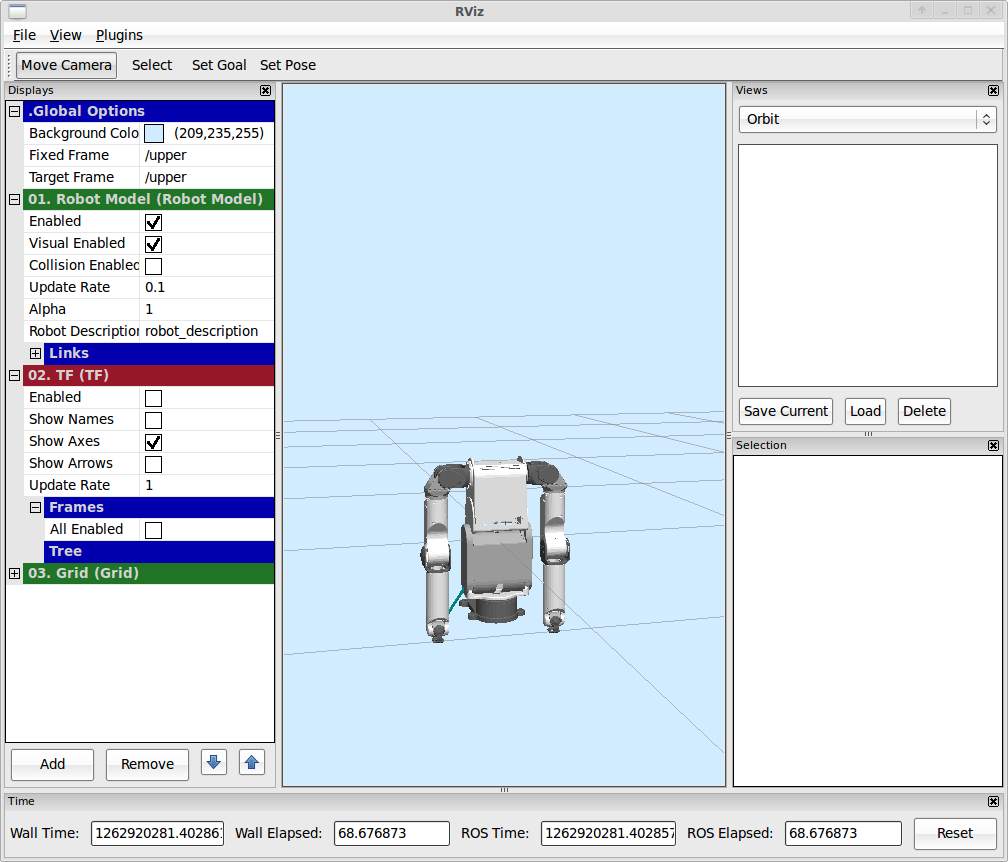
The goal is to develop a set of demos, which demonstrate the capabilities of the Meka, and provide a basis on which researchers can base their experiments. As the robot is not yet available at ENSTA, initial work focused on the robot's environment, meaning ROS and the M3 software (provided by Meka Robotics, based on both C++ and Python scripts) and on trying to implement a simple ball-catching demo : the idea is to throw a ball toward the robot which catch it (basic human-robot interaction, combining both perception and control). Different tracking algorithms are being tried for the ball, such as Camshift, Hough Circles + Kalman Filter, or more complex LineMod (all included in OpenCV) to finally estimate its trajectory for the robot to catch it. The M3 software provided by Meka Robotics contains a simulation environment that allows us to work without the robot hardware (cf. 4 .

ErgoRobot/Flowers Field Software
Participants : Jérôme Béchu [correspondant] , Pierre-Yves Oudeyer, Pierre Rouanet, Olivier Mangin, Fabien Benureau, Mathieu Lapeyre.
In the context of its participation to the exhibition “Mathematics: A Beautiful Elsewhere” at Fondation Cartier pour l'Art Contemporain in Paris (19th October 2011 to 18th March 2012), the team has elaborated and experimented a robotic experimental set-up called “Ergo-Robots/FLOWERS Fields”. This set-up is not only a way to share our scientific research on curiosity-driven learning, human-robot interaction and language acquisition with the general public, but, as described in the Results and Highlights section, attacks a very important technological challenge impacting the science of developmental robotics: How to design a robot learning experiment that can run continuously and autonomously for several months?
The global scenario for the robots in the installation/experiment is the following. In a big egg that has just opened, a tribe of young robotic creatures evolves and explores its environment, wreathed by a large zero that symbolizes the origin. Beyond their innate capabilities, they are outfitted with mechanisms that allow them to learn new skills and invent their own language. Endowed with artificial curiosity, they explore objects around them, as well as the effect their vocalizations produce on humans. Human, also curious to see what these creatures can do, react with their own gestures, creating a loop of interaction which progressively self-organizes into a new communication system established between man and ergo-robots.
We now outline the main elements of the software architectures underlying this experimental setup.
System components
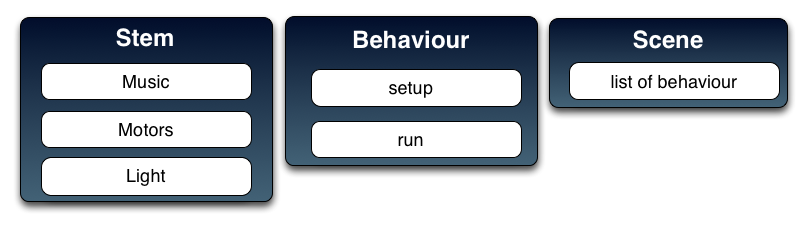
The software architecture is organized to control the experiment at several levels, and in particular:
Scenes: The organization of behavioural scenes, managing the behaviours that are allowed to each robot at particular times and in particular contexts;
Behaviours: The individual behaviours of robots, also called stems, which are outlined in the next section;
stems: The low-level actions and perceptin of robots while executing their behaviours, including motors control on the five physical stems, color and intensity of lights inside the stem head, production of sounds through speakers. Sensors are the kinect used to interact with visitors, and motor feedback capabilities.
In addition to that a video projector is used to display some artistic view of stem agents internal state.
Behaviours
A number of innate behaviours were designed and are used by the robots as elementary behaviours of more complex behaviours, including the three following learning behaviours.
The Naming Game is a behaviour played by stems two-by-two and based on computational models of how communities of language users can self-organize shared lexicons. In the naming game, stems interact with each other in a stylised interaction. Repeated interactions lead to the development of a common repertoire of words for naming objects. More precisely, object belong to meaning spaces. Two such spaces have been implemented for the exhibition. The first one is related to object spatial categorization and the second one is related to movement categorization. The object space contains stems, some hole in walls and the interaction zone. The movement space contains representations of small dances that stem can produce and reproduce.
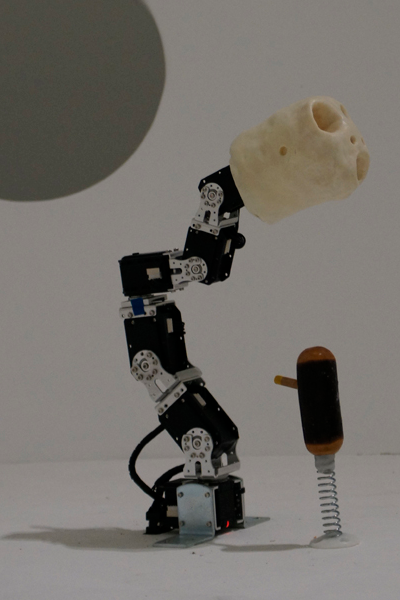
Object Curiosity is a behaviour in controlling intrinsically motivated exploration of the physical environnement by the stems. A small wood object is present in the reachable physical environement of the stem, attached on the top of a spring so that it is guaranteed that it comes back to its original position. The stem uses a motor primitive to act on the object and motor feedback to detect movements of the object. The robot learns through active exploration what kind of parameters motor primitive will result in touching the object.
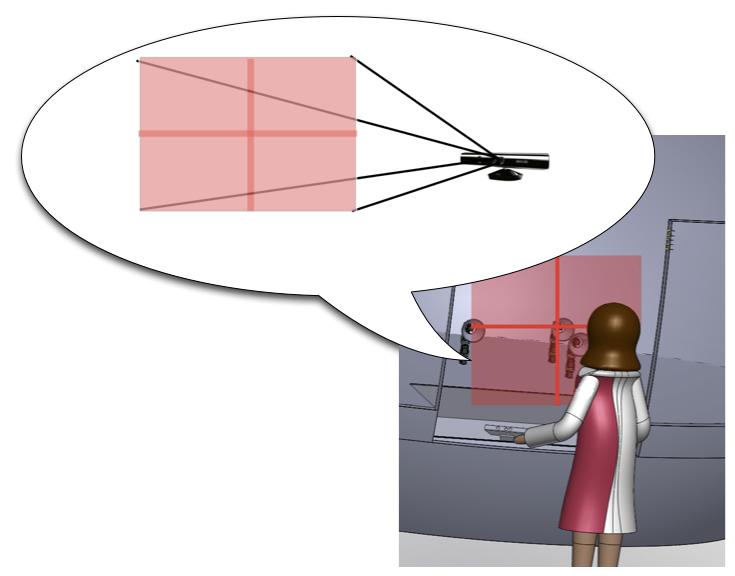
Birds Curiosity is a behaviour that drives robots to explore, through curiosity-driven learning, interaction with humans. One stem, generally the stem in the center, plays a sound, predicts the visitor reaction, look the interaction zone and wait the gesture of the visitor. To produce a sound the visitor have to make a gesture in space. In the next iterations, the robot chooses to produce sounds to human which produce most surprising responses from the human (i.e. the robot is “interested” to explore sound interactions which are not easily predictable by itself).. As describe in the picture, the space is split in four. Each zone corresponding with a sound.
Programming tools
The system is based on URBI and used some UObjects from UFlow. The most important part of the system is written in URBI script. Python and freenect (Kinect library) are used too.
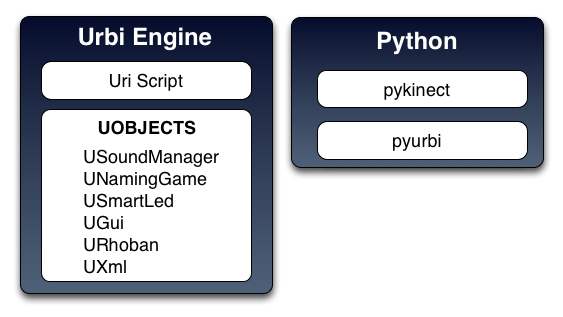
The system at the startup detects motors and lights. It create dynamically a list of Stem. A Stem is one robot with 6 motors as described in hardware part.
To interact with people, we used the freenect library to interface with the kinect, with a binding to python where detection and following of gestures is made.
For the display, we display an abstract rendering of the structure inside each ErgoRobot, using a python parser to read and parse log file from the ErgoRobot system, and the Bloom/Processing software to create and display the rendering. Currently, the system has three displays, one for the naming game, another one for birds curiosity and the last one for objects curiosity.
The sound system used the UObject USoundManager. It plays sounds when required by a behaviour, it also plays word sounds in Naming Game behaviour.
The Light system used Linkm technologies. In the head of each ErgoRobot we put two lights devices. Each light device is a RGB Light. We can control the intensity of each primary color through I2C control. To control lights we used LinkM USB Device. And finally we used an UObject dedicated to communicate with the USB Device.
Maintenance
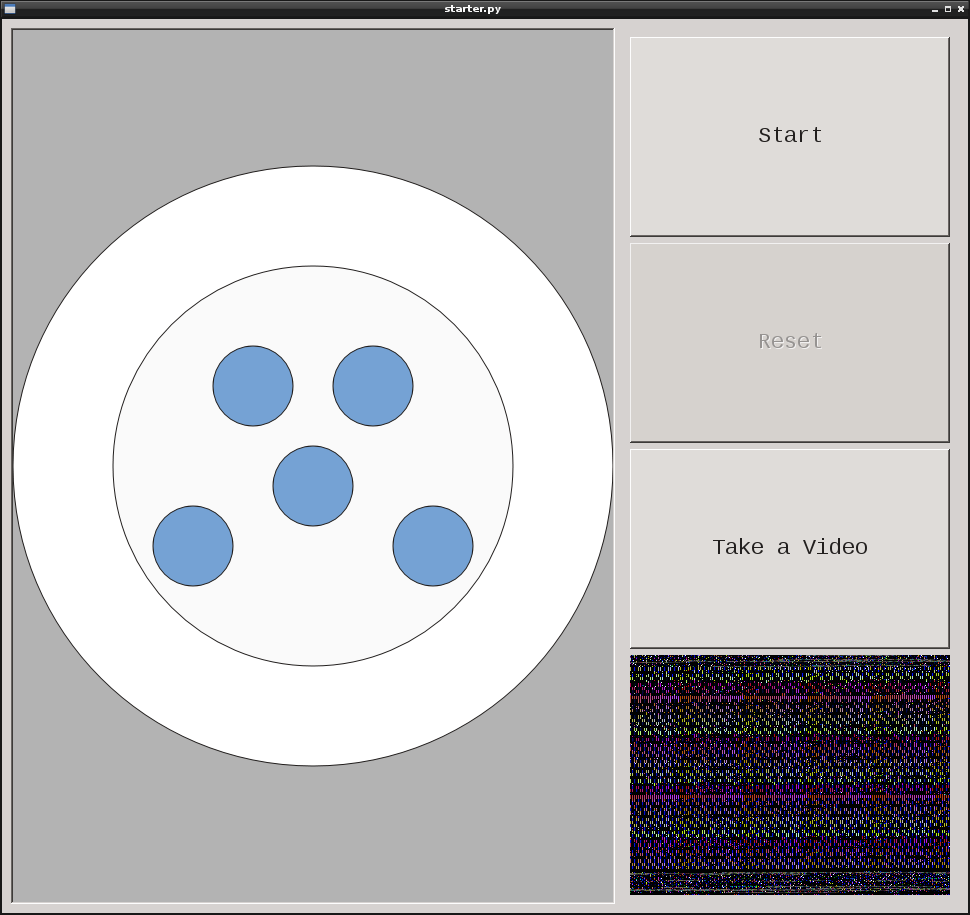
A dedicate maintenance software is used to switch off, switch on the system. This software is written in Python (and Qt). The status of ErgoRobots is display on the graphical interface. Buttons are present too : Start, Stop, Reset and Take a video.
Recently we added a video system to have a visual feedback of motors usage and also to detect eventual problems. This is a screenshot of the application :
MonitorBoard - Complete solution for monitoring Rhoban Project robots
Participants : Paul Fudal [correspondant] , Olivier Ly, Hugo Gimbert.
In collaboration with Rhoban Project/LaBRI/CNRS/Univ. Bordeaux I, the Flowers team took part in a project to exhibit robots at the International Exhibition in Yeosu - 2012 - South Korea (8 millions of visitors expected, from more than 100 countries). The installation consisted in three humanoids (one dancing, two playing on a spring) and five musicians (arms only) playing musical instruments (electric guitar, electric bass guitar, keytar, drums, DJ turntables). In order to increase the robustness of the robotic platform, a complete solution of software and hardware was build. The software solution aims to allow all robots to run safely during the whole exhibition (12 hours per days) and to provide an easy way to diagnose and identify potential electronic and mechanical failures. This software is able to monitor all robots at the same time, verify the health of each motors and each embedded systems. It is able to shutdown or reboot a robot if necessary using PowerSwitches (electric plugs controlled over network) and notify maintenance personal by email explaining the failure. All information is also logged for statistical use. This solution allows to monitor the whole platform without being present, and provides warning signs enabling preventive actions to be taken before an actual failures. It was entirely written in using Microsoft Visual Studio 2010 with .NET API and combined with the existing Rhoban Project API, extended and modified for this purpose. It also involved electric plugs controlled over a network connection.
Motor tracking system
Participants : Jérôme Béchu, Olivier Mangin [correspondant] .
We developed a website interface to a database of motors used to build robots in the team. This system is designed for internal use in the team and was developed using the django web framework (https://www.djangoproject.com/ ) .